1.生体信号を使ったハイブリッド操舵モデルのオンライン推定(図1): 生体信号の一つである眼球情報を実時間で検出し操舵に利用する注視点依存型のハイブリッドモデルの研究を行っている。ヒューリスティック探索アルゴリズムを用いてドライバの状態を推定できる。ドライバの過労や漫然運転の防止に応用していく。

本研究室では、ロバスト制御などの制御技術をベースとして、視覚に注目した作業のモデルや,それを用いた人間機械系/自動化設計に注力している。
1.生体信号を使ったハイブリッド操舵モデルのオンライン推定(図1): 生体信号の一つである眼球情報を実時間で検出し操舵に利用する注視点依存型のハイブリッドモデルの研究を行っている。ヒューリスティック探索アルゴリズムを用いてドライバの状態を推定できる。ドライバの過労や漫然運転の防止に応用していく。
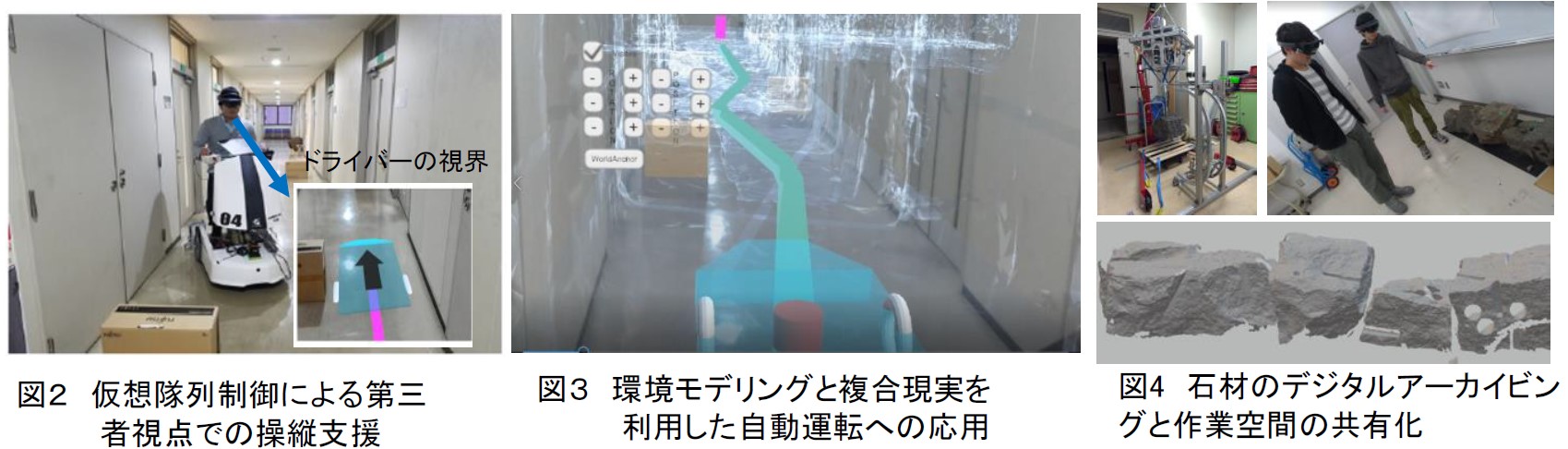
2.拡張現実や複合現実を用いた操作支援(図2、3): 超高齢社会では、自力で福祉車両を運転することが求められる。しかし運転の習熟も困難となるため、操作機能と認知機能を同時に補償できる支援機能が必要となる。拡張現実や複合現実を用いて、第三者視点での安全な操縦を可能にする隊列制御を拡張したビジュアルアシスト技術の研究を行っている。
3.環境のデジタルアーカイビングによる協業作業への応用(図4): ヘッドマウントディスプレイのモデリング機能を利用した高速モデリングや複数作業者での仮想作業空間の共有化の研究を行っている。この技術は、熊本地震で崩落した熊本城石垣の復旧作業で検証中である。今後は動的作業に応用していく。